

 Global
Global  United States
United States 
What is Georeferencing?
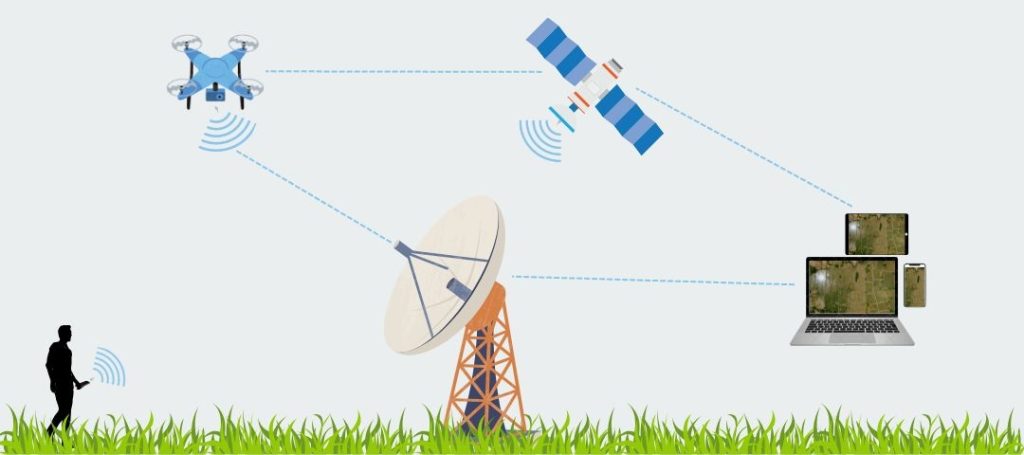
In the field of remote sensing and geospatial data analysis, automated georeferencing plays an important role in the critical process of working with drone imagery. It is the process of assigning real-world coordinates to each and every pixel in an image obtained through cameras mounted on drones. The image coordinates are transformed into a coordinate system related to a specific geographic area. We are aware that drones offer great flexibility and cost-effectiveness in capturing high-resolution images, terrain data and to add value to the same, georeferencing is used.
Georeferencing and drone mapping are interrelated in the geospatial analysis process. Drone mapping involves capturing aerial images and area-specific data with the help of drone-based cameras, sensors for creating maps, 3D models and processing geospatial information. Initially, as the drone flies over an area it captures various overlapping images which are stitched together as a part of the image mosaicing process using photogrammetry software. Automated georeferencing makes sure that the maps created through drone mapping are accurately aligned with the real-world coordinates for producing reliable and precise geospatial data. It involves using ground control points (GCPs), direct georeferencing methods and more. The global georeferencing analytics and solutions market was valued at ₹7.154 trillion in 2022 and is projected to grow at a CAGR of 12.6% till 2030. The geospatial solutions and analytics market in India was reported to be valued at ₹87.29 billion in 2024 and is surging at a CAGR of 14.82% to reach a projected value of ₹168.778 billion in 2029.

Growing market size of video mosaicing and georeferencing in India from 2019 to 2030
Importance of Georeferencing Solutions
Drone mapping is commonly used in various industries such as agriculture, construction, environmental monitoring, mining, urban planning, large-scale surveys, object-based image analysis etc., while georeferencing ensures the accuracy of maps and spatial data in various fields like geographic information systems, remote sensing etc. applications that require precise location data. Drone mapping allows quick collection of area-related information, but this data is processed and added value to when relations are derived between the same and field observations, geospatial data, satellite imagery, datasets etc. Georeferencing solutions from drone imagery are important as they ensure that data is accurately analyzed as well as integrated with other geospatial datasets. Images that have been georeferenced feature interoperability and can be easily shared and utilized across different platforms and applications. These solutions also enable the derivation of insights from retrieved data in the case of geospatial analysis, for example, landscape patterns and periodic changes.
Methods of Automated Georeferencing
A process related to this context is geotagging which is the practice of adding geographical identification metadata to images and videos obtained by drones as a part of intelligent video analytics solution. It simply records and embeds the GPS data or location information into these files. It is the easiest and cheapest method of georeferencing a drone dataset, but it is not very accurate due to the limitation of accuracy in GPS data where units can only record up to a few meters. If one tries to seek relation between the recorded data and other high-resolution geospatial data, potential errors in the former may be observed. Given below are a few other methods of automated georeferencing for drone-based imagery differentiated on the basis of accuracy of results and industry wise applications:
Ground Control Points
Ground Control Points (GCPs) are clearly identifiable, fixed physical locations, or precise coordinates present or placed in the survey area/ground under observation with known coordinates that help in aligning the aerial images to the correct geographical point. The naturally occurring or man-marked points are identified in the imagery and are used to align and correct the image to match with real-world coordinates. Well-distributed locations across the flight area are chosen, then the Global Positioning System (GPS) equipment is used to accurately survey, measure and record the coordinates of GCPs (represented as black and white tiles) present in that area. The drone takes flight over the areas of interest and captures images while ensuring that the GCPs are visible in the images. This is followed by image mosaicing which involves combining multiple images to develop larger panoramic images, satellite imagery and large-scale maps by aligning and blending images that may have overlapping fields of view. In mosaicing, the images are aligned based on their common features in a process called image registration; they are warped, adjusted to fit together and blended to smoothen transitions between images, create a seamless final output image and improving accuracy of image georeferencing in data processing.
This affordable and commonly used solution differs from image stitching which is a specific type of image mosaicing focused around seamlessly merging images and creating high-resolution composites. It involves precise alignment, blending, image registration and calibration to ensure that the seams and distortions between the images are not visible or are minimized. It is widely used in photography for creating wide-angled or panoramic images, high-resolution maps and medical imaging. It is a more refined and seamless approach as compared to image mosaicing, although both processes combine multiple smaller images to a single larger image. After the mosaicing or stitching process is completed, a Geographic Information System (GIS) or georeferencing software is used to input GCP coordinates and adjust drone-based imagery in order to align with real-world coordinates.

Ground Control Points-based georeferencing and video mosaicing
Post-Processing Kinematic
Post-Processing Kinematic (PPK) is an advanced method for georeferencing that utilizes GPS or geotagging data collected during drone flight. It corrects position data during data processing and is useful for achieving average precision georeferencing. Though more expensive, this method has a higher level of precision than geotagging and does not require any extensive GCP or wireless communication network, which would in turn have required lots of investment influx for establishment. Another advantage is that the additional time required for collecting GCPs on the ground is reduced drastically. It is ideal for remote locations and places where weak and unreliable signals can be anticipated.

Post-Processing Kinematic georeferencing and video mosaicing
Real-Time Kinematic
Real-Time Kinematic (RTK) is similar to Post-Processing Kinematic and requires the same hardware, but it offers the additional advantage of applying corrections in real-time during the drone’s flight instead of video mosaicing. The process involves a single base station or virtual response station like the CORS network that transmits correction signals to the drone for recording positioning data precisely. Due to the ability to retrieve georeferencing data immediately, operators can conduct real-time corrections, decision-making with minimal requirements of post-processing and streamlined workflows. This solution provides highly accurate GPS to drones without the need for GCPs and easily pairs with base stations amidst stable connection for the aforementioned corrections. The drawback is that due to lack of drone obstacle avoidance capability, interference may occur between the base station and drone during mapping sessions, and since it requires wireless network, it is not ideal for operating in remote locations.
Real-Time Kinematic georeferencing and image mosaicing
Direct Georeferencing
This process uses an onboard GPS and Inertial Measurement Unit (IMU) to record the orientation, alignment of drone and its positioning in real-time as it continues to capture images during its flight. Direct Georeferencing eliminates the need for GCPs and can therefore be used for rapid UAV drone land surveying. It is ideal for large, closely placed, uneven superficial terrains, marine environments, steep hillsides, mangroves etc., where it is difficult to establish a GCP network. It is especially beneficial for time-sensitive applications and emergency responses. It associates geographic coordinates directly with data collected from sensors such as cameras and LiDAR.
Tools & Best Practices for Automated Georeferencing
Several tools and software packages are used for georeferencing for drone images, ranging from general imaging tools to specialized GIS software such as the following:
- GIS Software: Comprehensive platforms that allow robust georeferencing solutions and supports integration of GCPs, PPK and RTK data, for example, ArcGIS. There are also certain powerful open source georeferencing tools and plugins available for processing drone-based imagery, such as QGIS etc.
- Photogrammetry Software: This category includes specialized software for drone mapping and automatic georeferencing based on GCPs, RTK or PPK data, for example, Pix4D. It also involves photogrammetric tools that are capable of processing images into georeferenced orthomosaics and 3D models, for example, Agisoft Metascape etc.
- Image Processing Software: Basic georeferencing tasks, adjustments can be done in Adobe Photoshop and certain tasks like running image processing algorithms can be done via ImageJ.
Moving forward towards the best practices for georeferencing drone imagery such as:
- Planning the Flight: Developers must ensure that GCP locations are selected wisely, points are easily identifiable and well-distributed all across the drone’s flight area to improve accuracy.
- High-Quality GPS: Developers must invest in and use high-quality, accurate GPS units/equipment for surveying GCPs to ensure reliable data.
- In-Flight: During the flight, maintaining consistent flight altitude and overlapping between images is of utmost importance for better stitching and georeferencing solutions.
- Condition Monitoring: Flight operators should ensure that image quality remains impeccable by paying attention to weather and lighting conditions that could affect it.
- Post-Processing: GCP coordinates need to be cross-checked and validated with reliable sources. Software settings such as desired precision level and output format must match specific needs of the project.
- Continuous Learning: AI models and algorithms can be trained with varied types of datasets to improvise the accuracy of geospatial analysis. Advanced technologies and methods can be incorporated to enhance the working of mosaicing and steps/parts of the process.
Georeference your Drone Datasets with KritiKal
KritiKal helps you to develop, implement, test and debug georeferencing solutions and also assists in processing, annotating, and refining drone aerial data. Businesses working in this domain can leverage advanced geotagging algorithms for drone-obtained images. It can integrate accurate and in-built GPS systems with drones for mapping capabilities and navigation purposes. Apart from geotagging images as per locations noted by the GPS, KritiKal also develops sophisticated processing software that uses location data for georeferencing drone imagery and orthomosaics. Georeferencing drone imagery is necessary for exploring the full potential of aerial data, for which developers must understand various methods, tools, standard practices and meaningful insight extraction from geospatial analysis. As discussed in the blog, developers need to stay abreast of new developments in industry-agnostic georeferencing systems, applications of which range from environmental monitoring to urban planning to maximize the value of drone imagery. Please contact us at sales@kritikalsolutions.com to know more about our drone-related services.

Nikhil Kushwaha currently works as a Senior Software Engineer at KritiKal Solutions. He has extensive experience with embedded systems and software, character device driver development, porting embedded Linux on ARM systems using storage, processes and threads synchronization, memory and process management, implementation of Inter-Process Communication etc. With his varied skills in Embedded C, C++, Python, Fedora, BASH Shell scripting, MQTT and Sockets protocol and more has helped KritiKal in developing and delivering robust embedded solutions to some major clients.