

 Global
Global  United States
United States 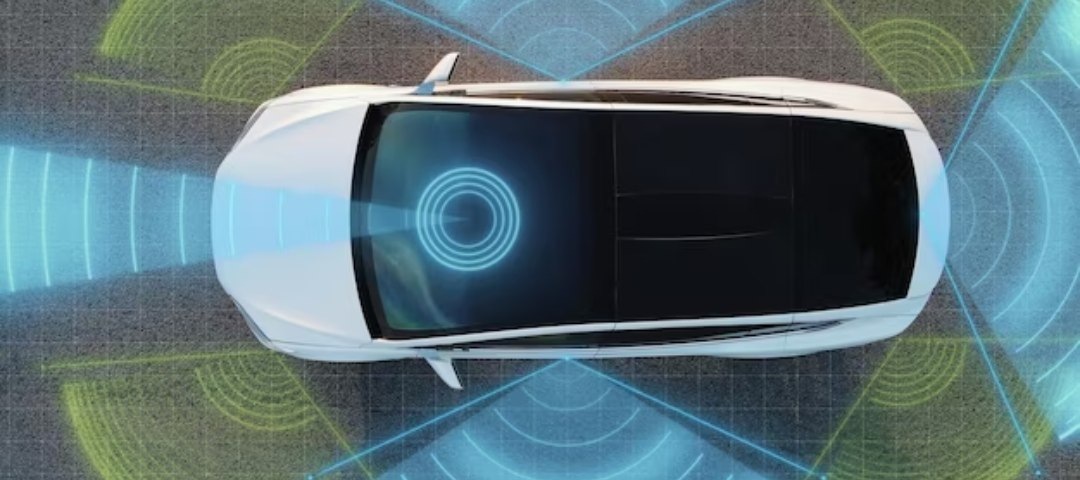
In the modern era, tricky parking spots, minor low-speed scuffs, scraping wheels on curbs, bumper hits, door dents, inaccurate view from convex mirrors etc., no longer pose trouble for car drivers. These issues are a thing of the past, especially since installation of rear-view cameras or sensors on cars has been made compulsory across the United States (2018), India and some other countries.
A 360-degree camera for cars utilizes images that it receives from multiple stand points of view of the environment in which the car is traversing. These cameras are strategically placed on various points on cars to receive wide view coverage. These are often installed on the front grille, corners of the bumpers, within the emblem, near the trunk release at the rear end, underneath the side view mirrors, etc. that allow it to cover all blind spots that may not be caught by the human eye. In most cases, they turn on automatically when the reverse gear of the car is engaged or when a button is pressed for accurate parking and exiting.
The global market for 360-degree cameras was valued at USD 1.1 billion in 2022 and is projected to increase at a CAGR of 22.5%, to reach a market size worth USD 8 billion by 2032.
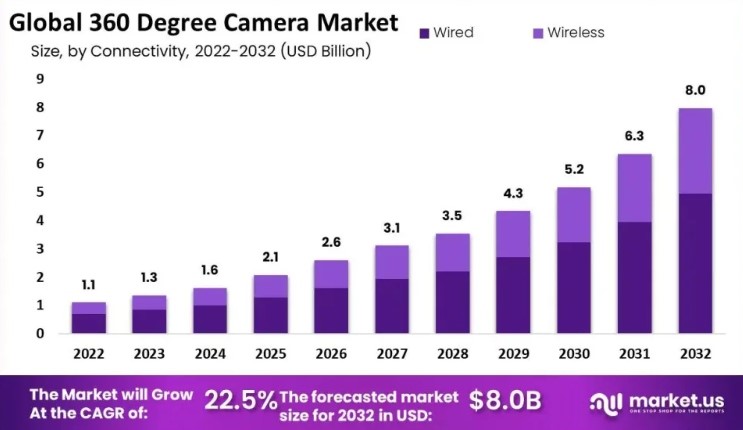
Market size outlook for surround view camera from 2022-2032
How Does a 360-Car Camera Work?
The 360-degree wide-angle camera system with fisheye lenses, also known as top-down or around-view camera, is a combination of software and hardware that provides a real-time bird’s eye view covering the surroundings of the car, where the vehicle graphic is illustrated in the middle with gridlines. This system provides a combinatorial perspective of an array of images from multiple video cameras placed on the car that are stitched into a single clear and concise 360-degree image by the dedicated software control module and displayed over the infotainment system, dashboard or human machine interface, representing a typical top-down view. It does so, through a series of real-time processing that involve calibration and alignment of camera angles for object detection, removing distortion from wide lens caused by overlapping bits, collaborating with dynamic overlays, proximity or ultrasonic sensors and switching between various cameras as per requirement. The 360-degree camera for cars automatically gets turned off as the vehicle starts, enters speeding zones or starts moving at traffic speeds to avoid unnecessary distraction.
Schematic diagram showing working of bird’s eye view camera on car
Usually, infotainment systems have options to be adjusted to show different exterior angles, maximize and minimize single-side view, that is, real-time images, or video obtained from certain cameras such as passenger-side camera during parking or front camera to avoid off-road obstacles, hazards as per the driver’s convenience. Thus, not only do these systems provide a complete panoramic view but they are also equipped with visual and audible collision warning features that run on object detection technology enforced within the car’s vicinity. The cameras are concealed within the car’s design through effective positioning for protecting them from the environment. Drivers are commonly provided with a pre-installed bird’s eye view camera on car by automotive manufacturers. At times, they can also obtain aftermarket kits to install them on their pre-owned older versions of vehicles. The kit consists of multiple cameras and a controller that helps in linking these cameras to the infotainment system, although they provide results with lower resolution and preciseness as compared to inbuilt stock cameras.
An in-depth account of algorithms involved in these systems is given below:
- Image Stitching: Algorithms involved in this process perform techniques such as feature matching, for example, SIFT (Scale-Invariant Feature Transform) or SURF (Speeded-Up Robust Features) to detect features that act as reference markers; geometric transformation (Random Sample Consensus) to estimate translation, scaling, rotation between two images obtained from different perspectives; and blending to merge overlapping regions in images or discontinuities with respect to features.
- Object Detection: Objects, traffic signals, pedestrians, lane markings etc. within the camera’s field of view are classified, identified and located using machine learning techniques such as convolutional neural networks (CNNs) and Haar cascades based on visual features to trigger warnings through such bird’s eye view camera on car. To know more about different types of neural networks, do check out blog.
- Depth Estimation: Here depth refers to the disparity in distance of objects with respect to different corresponding points in stereo image pairs obtained from adjacent cameras. It is calculated by using algorithms for triangulation, disparity map generation and stereo matching and has applications such as augmented reality overlays, warnings etc.
- Motion Tracking: Algorithms involved in this function such as Kalman and particle filters, optical flow algorithms etc., analyze consecutive frames in the captured video, and predict future trajectories of objects in motion for collision warnings.
- Semantic Segmentation: In this case, individual pixels of the image are classified into categories based on their visual characteristics, such as drivable things like vehicles, non-drivable things like road, sidewalk, lane markings etc. Through this the surround view camera system understands the environment at a higher abstraction level for situational awareness, free space detection, mirror replacement and elimination of blind spots.
ADAS & 360 Degree Camera for Car
Advanced driver-assistance systems require these top-down view cameras for providing an immersive driving experience. They enable effective blind spot detection, and timely collision warnings via real-time imagery. ADAS assist drivers for parking in crowded spaces using 360-degree camera for car for trajectory guidelines, visual overlays, proximity alerts and obstacle detection, for example, cyclists, pedestrians and other vehicles to mitigate imminent accidental risks. These cameras detect the presence of vehicles changing lanes without proper signaling through visual, audio and haptic feedback in complex road scenarios, such as in case of faded and obscured lane markings. Drivers are alerted by ADAS solutions powered with these cameras for cross-traffic and lateral blind spot detection while reversing out.
Advantages of Surround View Camera
Better Visibility
These camera systems show nearby obstacles that help drivers avoid unnecessary damaging impacts. Chances of mis-happenings such as curbing of wheels, scuffing of bumpers etc., can be completely diminished by using these systems, providing peace of mind to drivers. These are easy to turn on/off and respond quickly on all types of HMI screens. Not only cars of different sizes, make and models like SUVs, sedans, etc., can accommodate these systems, but these can be easily integrated with all types of heavy motor vehicles. The bird’s eye view camera on car provides convenience and maneuverability for effective lane changes and tight space navigation across streets.

Rear end 360-degree camera for car activated during reverse parking
Parking Assistance
Almost all new generations of freshly manufactured vehicles are equipped with automatic parking assists, that keep on evolving with additional feature updates every year. These systems are integrated with driver assistance features such as lane departure warning system to avoid collisions with other vehicles near the parking spot during entering or exiting. Overall, they help drivers save money and time that would have otherwise been lost on dent damage. No matter how big the vehicle, these systems help to fit in constricted parking spots easily. Read more about smart parking management in our related blog.
Security
Cameras placed on dashboards, bumpers and rear ends serve as effective tools against vehicle theft, hit-and-run cases, accidents during heavy traffic, run over cases and collisions with pedestrians, cyclists, as well as other legal matters. They form an integral part of ADAS solutions that provide lane changes, obstacle and collision warning using object detection and ensure safety. To read more about human detection using opencv, visit our blog. They highlight blind spots which are usually missed by rear view mirrors and avoid such mis-happenings and crimes.
Cost-Effective
It is very easy to obtain updates for software and hardware associated with 360-degree camera for car, thus, making it a cost-effective solution that renders multiple benefits. It helps drivers to avoid accidents, and unnecessary expenses spent on vehicle damage through scuffs etc. They provide an additional sense of security at no extra cost associated with the vehicle.

Evolution of parking assistance with 360-degree camera for car
Challenges Associated with Surround View Camera
Complexity
Implementation of these cameras is a cumbersome process, especially when they need to be integrated into older versions of cars and vehicles. With compulsion as per federal regulation law, manufacturers facing additional costs of installing these cameras with newly evolving features to stand out in the competitive automotive market.
Environment
Similar to any hardware exposed to adverse environmental conditions, 360-degree camera for car face issues related to visibility obstruction, rusting, rotational disability during rough weather, short circuit in rain, low lighting conditions for image capture at night, malfunctioning in snowy climate or hailstorm etc.
Maintenance
Regular maintenance is mandatory for optimal performance of 360-degree camera for car, minimal update or service per year should be enforced for ensuring reliable systems. The number of service and maintenance requirements may vary according to regional climate. At times, firmware-over-the-air updates and software updates may not be received on a timely basis due to multiple reasons like network issues, unserviceable areas and more. This leads to drivers missing out on important updates, thus involving additional expenses for them.
Conclusion
The main functionality of 360-degree camera systems is to enhance safety, convenience and visibility while driving vehicles. They provide an overall upthrust to situational awareness of the driver during heavy traffic, low-speed maneuvers, tight spaces, other blind spots, and help them navigate obstacles efficiently.
KritiKal Solutions has a comprehensive understanding of working with surround view systems. It has developed an industry-standards compliant in-house 360-degree camera system as a part of its ADAS solutions, with assistance for camera embedded Linux setup, dependency and guideline calibration finalization on embedded boar etc. It provides a full-fledged surround view system application with QT/Westron user interface, camera feed capture, control and configuration. Drivers can easily link user interface and stitched feed to display or HDMI output with memory optimization and low compute overlay generation during runtime. Join hands with KritiKal to leverage its automotive market exposure, experience of dealing with various surround view camera modules and capability to innovate unique ideas. Please call us or mail us at sales@kritikalsolutions.com to resolve challenges related to these camera systems.
Enhancements in such bird’s eye view systems, for example, integration with sensor technology, LiDAR, radar, HUD, AR, autonomous driving etc., hold a promising future for automotive innovations. It is expected that the ongoing research and development in immersive driving and parking assistance systems will likely surge, thus, making it a common notion for businesses to invest and develop new innovative solutions around the same to make a place in the ever-evolving market.

Shashank Thakur currently works as a Senior Software Engineer at KritiKal Solutions. He is proficiently skilled in working with Artificial Intelligence, Machine Learning, Computer Vision, Algorithmic Designing, Statistical Data Analysis etc., and holds hands on experience in various programming languages such as Python, C++, SQL and more. He has dedicatedly helped KritiKal in delivering many successful projects for some major clients.
Damien Tucker
May 20, 2026It’s not often that we come across content that really resonates with us, but this one is a standout. From the writing to the visuals, everything is simply wonderful.